Experiment Overview
Every control system design begins with a mathematical model of the plant. For a servo-motor driving a gear train — used in aircraft flight control actuators, robotic joints, and gimbal systems — that model is typically a first-order transfer function relating input voltage to output shaft speed. This lab identified that model experimentally for the Quanser SRV02 servo-motor using two complementary approaches: a bump test to extract parameters from the step response, and a model validation experiment to iteratively refine those parameters until simulated and measured responses matched.
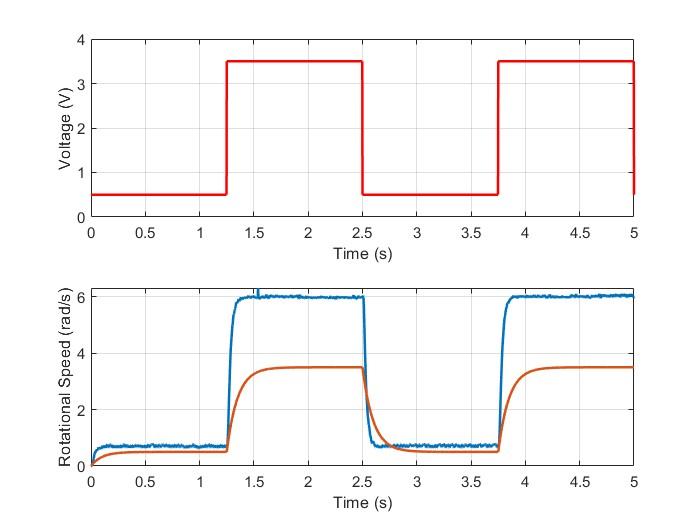
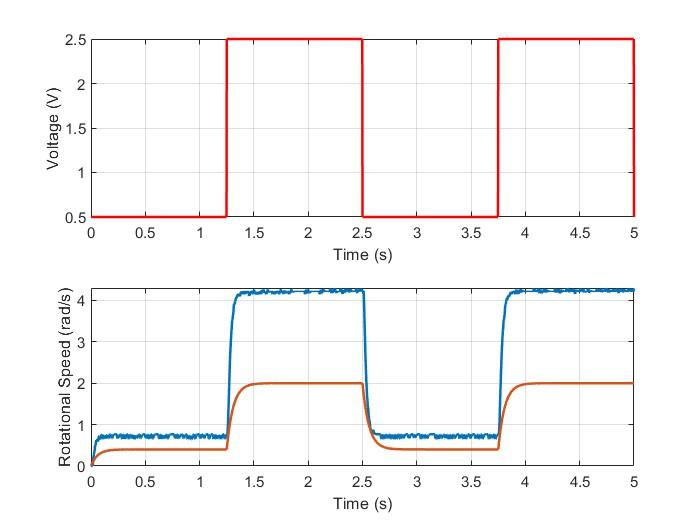
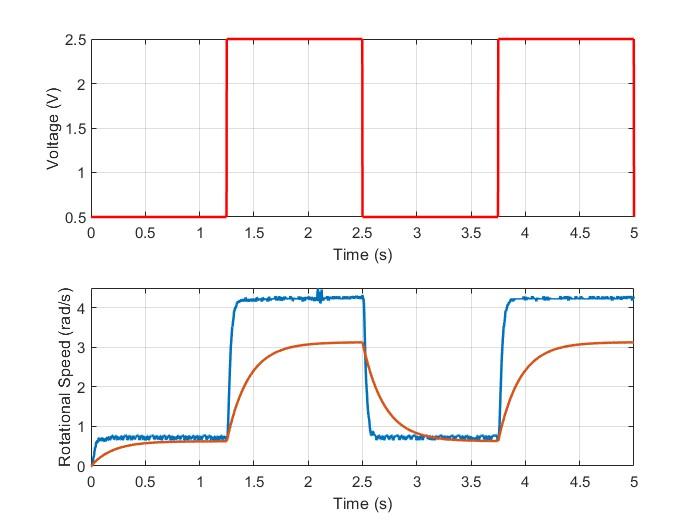
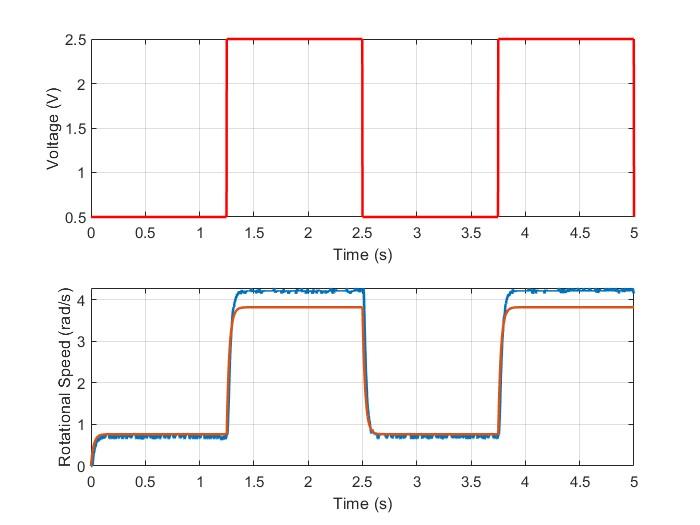
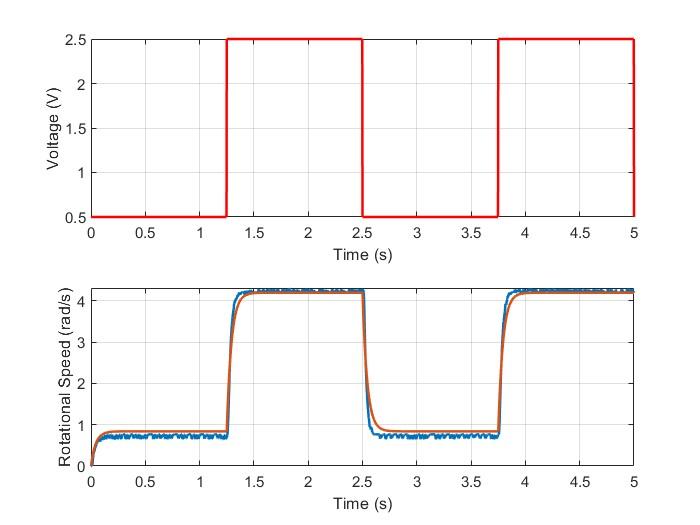
- Apply a square-wave step input to the SRV02 and record the load shaft speed response
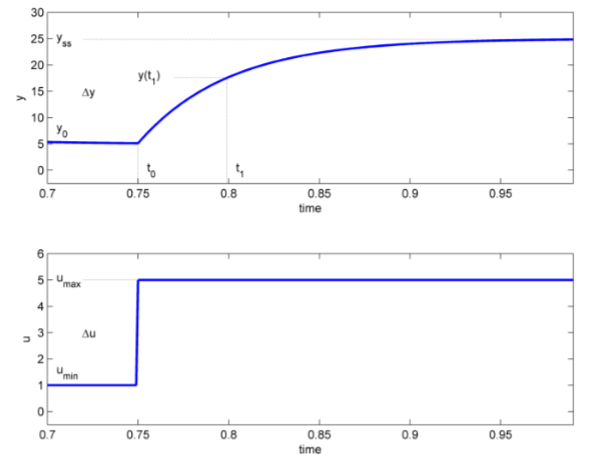
- Extract steady-state gain K and time constant τ using the bump test method
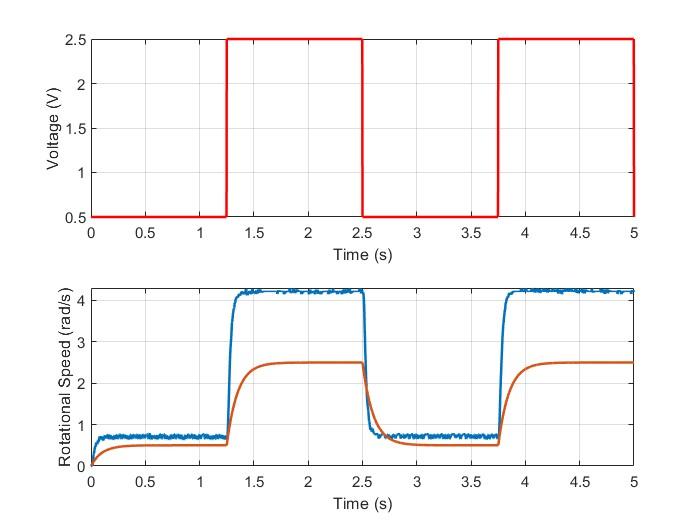
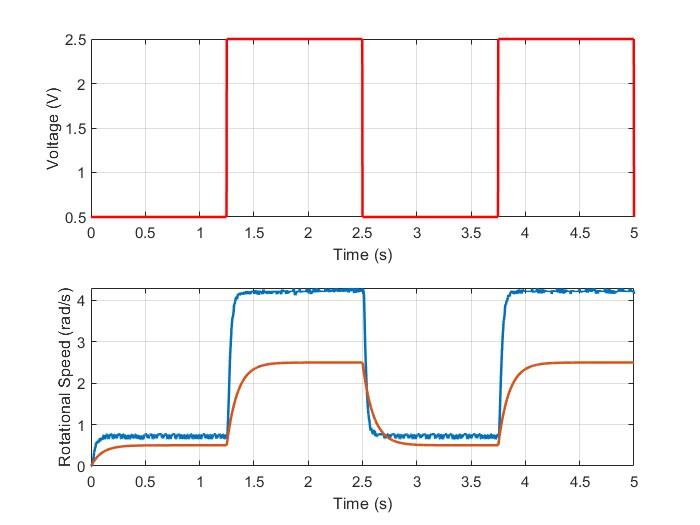
- Test multiple (K, τ) combinations in the Simulink model and select the best-fit parameters
- Understand how K and τ independently shape the magnitude and speed of a first-order system response